
| 步进电动机工作原理(1) |
| Stepping Motor Principle (1) |
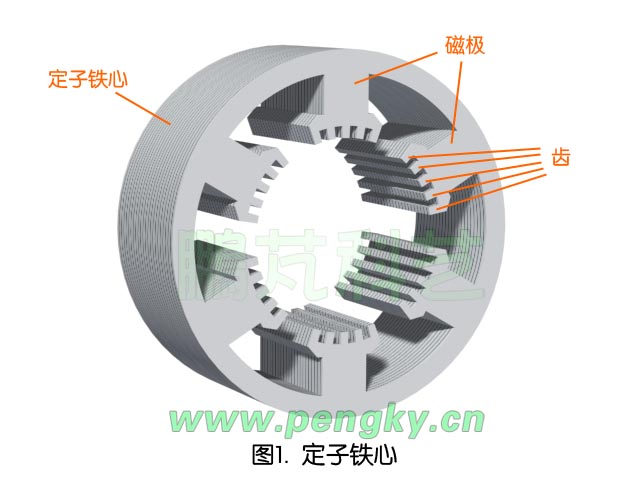
步进电动机的运转状态与普通电动机不同,它随供给电源的脉冲一步一步的转动,是一种数字电动机。步进电动机能随供给的电源脉冲数转动相应步数,而每一步的角度是固定的,所以步进电动机能按控制转动所需的圈数、角度,广泛应用在数控机床、自动化设备、仪器仪表等行业。本节介绍应用最广的反应式步进电动机。 反应式步进电动机是根据磁阻性质产生转矩工作的,遵循磁通总是沿磁阻最小的路径闭合的原理,由磁拉力形成转矩。前面介绍的开关磁阻电动机也可视为步进运行,因每切换一组线圈电源时转子就转动一定角度,只要停止切换转子就停止不动了,只不过每一步的角度是30度,应用在数控设备显然过于粗糙。实际应用的步进电动机步进角度较小,下面介绍的步进电动机模型每步为3度。 图1是步进电动机的定子铁心,在内周有六个磁极,每个磁极上有5个小齿,齿中心距为9度,齿宽与齿间隔大小一样,径向的两个磁极组成一对磁极,定子铁心由冲制的硅钢片叠制而成。 |
|
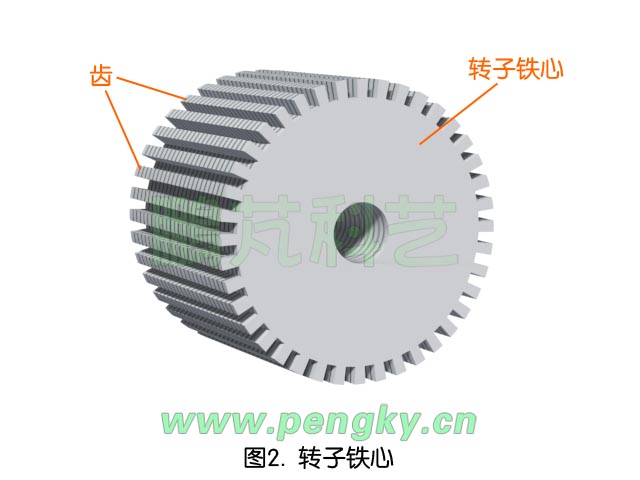
图2是步进电动机的转子铁心,转子上没有线圈,但在外圆周有40个小齿,齿中心距为9度,齿宽与齿间隔大小一样,转子铁心也由冲制的硅钢片叠制而成。 |
|
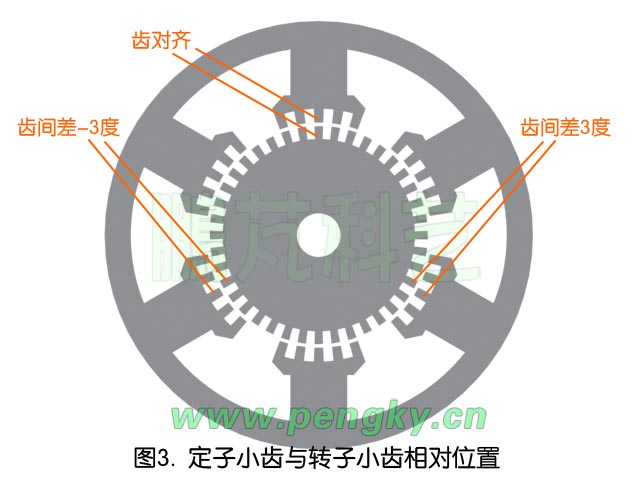
由于定子磁极上的小齿的齿宽与齿间隔与转子上的小齿一样,所以当定子的一对磁极小齿与转子小齿对齐时,另两对磁极小齿与转子小齿角度相差3度或-3度,见图3。 |
|
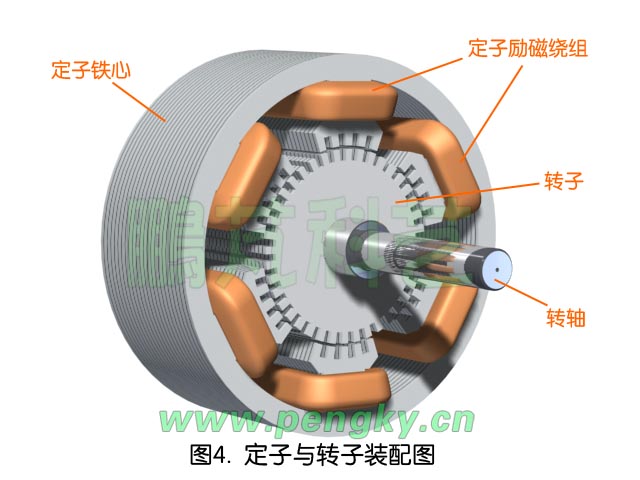
图4是绕有线圈的定子与装有转轴的转子组装图。 |
|
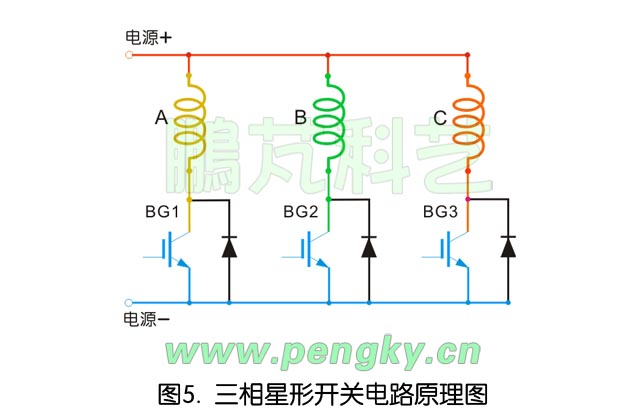
反应式步进电机多为三相线圈,本模型的三对磁极可绕三组线圈组成三相绕组。由脉冲信号发生器按照给定的设置不断向步进电机驱动器发送控制脉冲信号,驱动器又根据转动方向与运转状态向三相线圈供电(每输入一个脉冲信号切换一次供电状态),每一个控制脉冲电信号转子转动一步,每步转的角度称为步距角。 三相线圈分为A、B、C三个线圈,图5是用三个开关晶体管向三个线圈供电的连接图:三个线圈的一端与电源正极相连,另一端分别与驱动器内三个开关晶体管连接,构成星形连接。每个时期仅有一个开关晶体管导通一个线圈通电,这是一种基本的也是常用的工作方式。 |
|
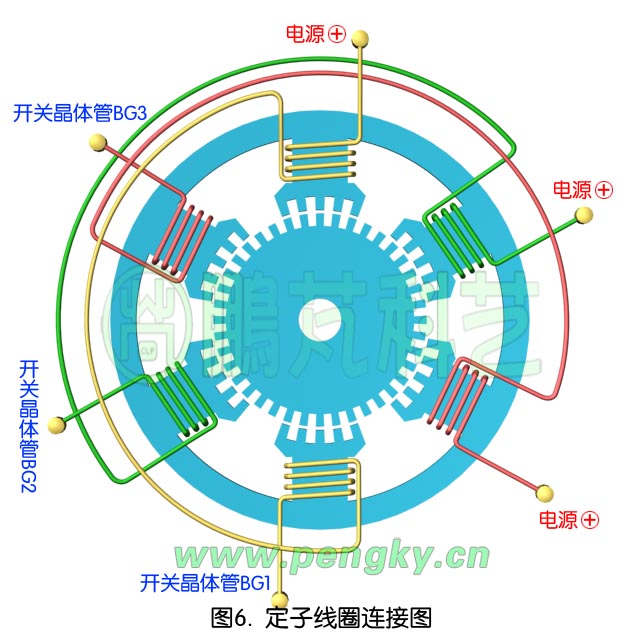
为了清楚的演示该步进电机模型的工作状态,我们取模型的正视图来作动画,图6是模型的正视图,清楚的显示了三相线圈的组合与连接,黄色线圈是A相线圈、绿色线圈是B相线圈、红色线圈是C相线圈。 |
|
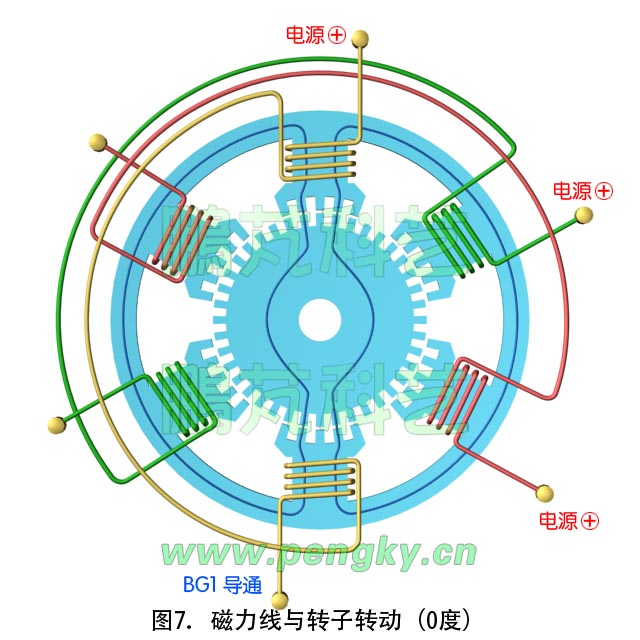
下面我们从动画中截取几幅画面,并用这些画面来介绍该步进电机的工作原理。图7是BG1导通A相线圈通电,此时转子被磁力吸引静止不动。 |
|
下接第二节“步进电动机工作原理(二)” |
| 返回上一页 | Back to Previous Page |
