
| 太阳能电池最大功率点跟踪 |
Maximum Power Point Tracking (MPPT) |
| 在前面课件中,介绍了太阳能电池的方位跟踪,是通过机械运动跟踪太阳的视运动。本课件介绍太阳能光伏电池的最大功率点跟踪控制MPPT(Maximum Power Point Tracker)。最大功率点跟踪可进一步提高太阳能电池的转换效率,充分利用光伏阵列转换的能量。 |
太阳能电池的伏安特性分析 |
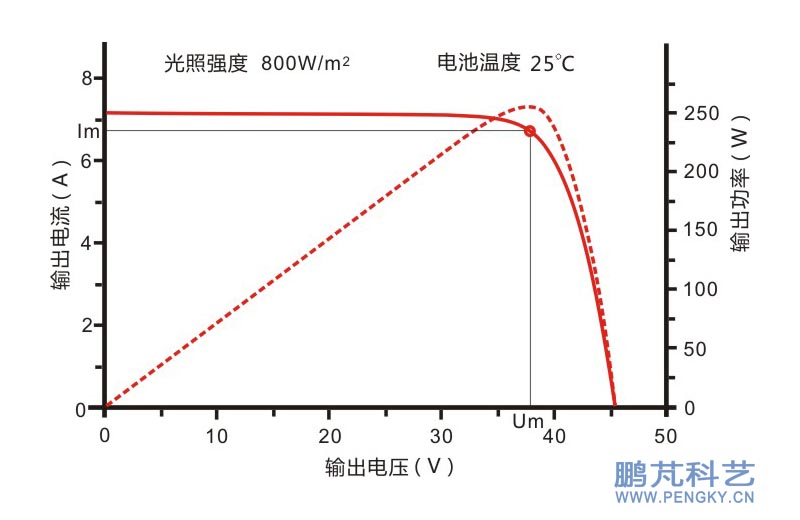
| 为什么要进行最大功率点跟踪,要从太阳能电池的伏安特性说起,下面以某品牌高效硅太阳能电池组件为例进行介绍,图1是该组件在光照强度(辐照度)为800W/m2,电池温度为25度时的特性曲线,图中红色实线是伏安特性曲线,红色虚线是电压功率曲线。在“硅太阳能电池工作原理”一节已介绍过,电池组件的输出功率随电压的变化曲线按电压功率曲线变化,在输出电压为Um,输出电流为Im时,输出功率最大,此点称为太阳能电池的最大功率点。 |
|
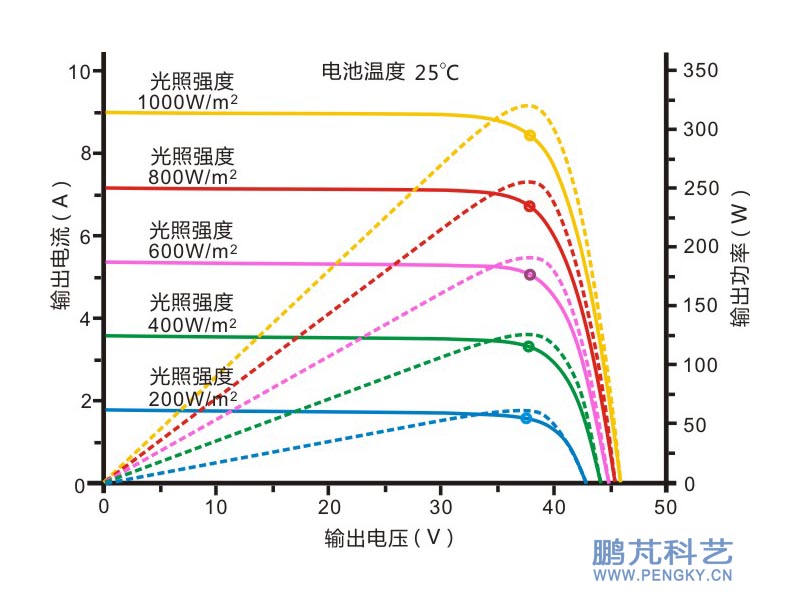
| 图1仅是光照强度为800W/m2,电池温度为25度时的特性曲线,但光照强度与温度发生变化时曲线会发生变化。图2是该电池组件在电池温度为25度时在不同日照强度下的伏安特性曲线与电压功率曲线。图中黄色实线是光照强度为1000W/m2时的伏安特性曲线,黄色虚线是光照强度为1000W/m2时的电压功率曲线,此时最大功率输出为320W,在伏安特性曲线上的小圆点是最大功率点。 |
|
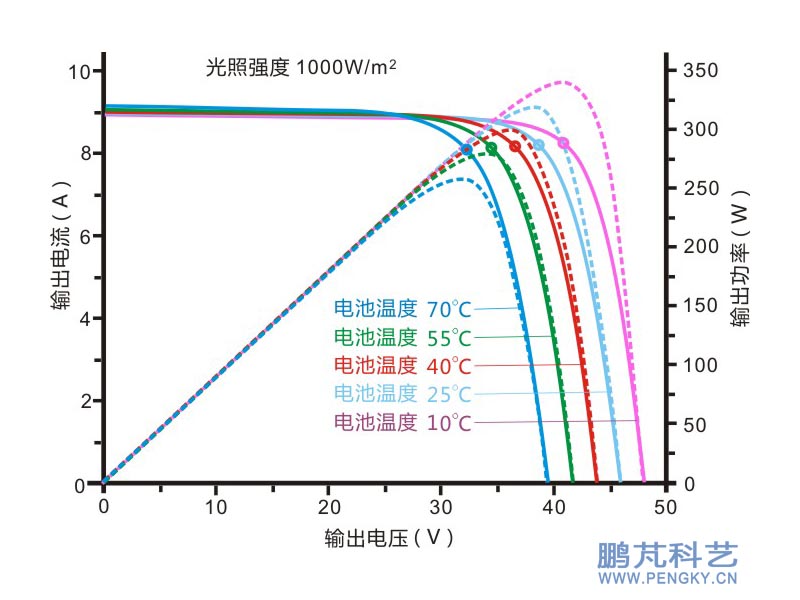
在图2中还有几组不同光照强度的曲线,例如光照强度为400W/m2时最大功率输出为125W。 总的特点是当光照强度增加时,太阳能电池的开路电压变化不大,短路电流增加,最大输出功率增加。 图3是该组件在光照强度为1000W/m2时,不同电池温度时的电压功率曲线。当电池温度为10度时,其伏安特性曲线如粉红色实线所示,电压功率曲线如粉红色虚线所示,此时最大输出功率为340W;当电池温度为55度时,其伏安特性曲线如绿色实线所示,电压功率曲线如绿色虚线所示,此时最大输出功率为280W。 |
|
可见其主要特点是电池温度增加时,太阳能电池的开路电压下降,短路电流稍有增加,最大输出功率减小。 |
| 太阳能电池最大功率点跟踪 |
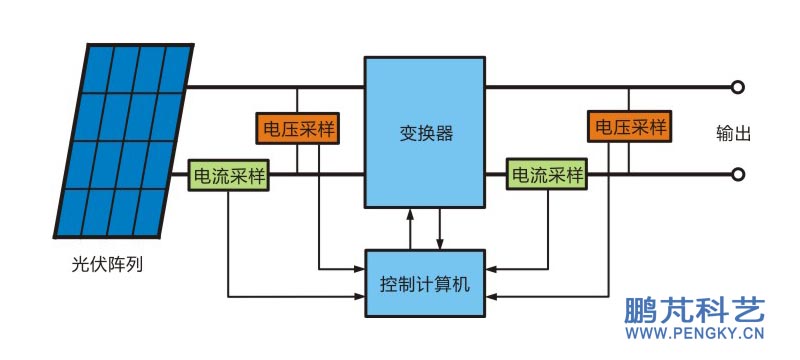
最大功率点跟踪控制MPPT使太阳能电池板能在各种不同的日照和温度环境下有效地跟踪最大功率点,是使用合适的MPPT 控制算法控制电池板尽可能地工作在最大功率点上。本课件只就常用的3种方法的工作原理作简单介绍。 图4是太阳能电池最大功率点跟踪控制主要组成框图,主要通过采集电池阵列的输出电压与电流,根据相应控制算法,调整变换器的输出来改变电池阵列的输出电压,达到对最大功率点的跟踪。变换器输出端的电压与电流检测用于计算机对输出控制的参考。 |
|
| 恒电压跟踪CVT(Constant Voltage Tracker ) |
在图2中可看到,当温度一定时,各曲线的最大功率点基本在一根垂直线上,只要找到这条垂直线,确定电压值Um,通过对负载的控制使电池板输出维持在Um,就可以保证电池板在大多数光照条件下工作在最大功率点。 CVT方法具有控制简单,可靠性高,稳定性好,易于实现等优点,由于这种跟踪方式忽略了温度对太阳能电池开路电压的影响。以单晶硅太阳能电池为例,当环境温度每升高1 ℃时,其开路电压下降率为0.35%~0.45%,对于四季温差或日温差比较大的地区,该方式不能在所有的温度环境下跟踪最大功率。 CVT方法的优点:控制方法简单、稳定性较高、易于实现。 CVT方法的缺点:由于没有考虑太阳能电池温度对开路电压的影响,当电池温度变化较大时能量损失较大。 CVT方法只是一种近似的最大功率跟踪方法,实用在环境温度变化不大、日照稳定的地区的小型光伏系统。 一个简单简单的方法,可在电池板附近设置环境温度检测,根据环境温度值与经验来修正Um值,可在一定程度上弥补温度变化带来的功率损失。 |
| 扰动观察法(Perturbation and Observation method) |
扰动观察法也称为登山法,是一个自然寻优过程,目前应用较多。其原理是在光伏阵列正常工作时,每隔一定的时间用较小的步长改变太阳能电池的输出电压,方向可以是增加也可以是减少,并检测功率变化方向,来确定寻优方向,如果输出功率增加,那么继续按照上一周期的方向继续“干扰”,如果输出功率减小,就改变其扰动方向,如此不停地周而复始,使太阳能电池板动态地工作在最大功率点的附近。 显然系统工作点无法稳定运行在最大功率点上,只能在最大功率点附近振荡运行,而振荡的幅值则由步长决定。若扰动步长过大,跟踪的速度快,但在最大功率点附近的振荡幅度比较大,可能造成较大功率损失;若步长过小,功率损失会小些,但跟踪的速度会慢,系统的响应速度降低。当日照随时间变化不快时,此算法是非常有效;当光强发生突变时,可能得到错误的跟踪方向。如果步长太小时会难以引起功率变化,无法判别寻优方向。 扰动观察法的优点:原理简单,测量参数少,转换效率高,硬件实现较为方便。 扰动观察法的缺点:步长对控制精度和速度影响较大,系统工作点无法稳定在最大功率点上,会导致部分功率损失;对外界环境变化的响应能力较差,故只适用于光强变化小的环境。 改进方法是在系统起动初期,或扰动引起的功率变化太小时可加大扰动步长,以尽快找到寻优方向,待系统稳定后再减小步长。这样可减小功率的损失。 |
| 电导增量法(Incremental ConductanceMethod) |
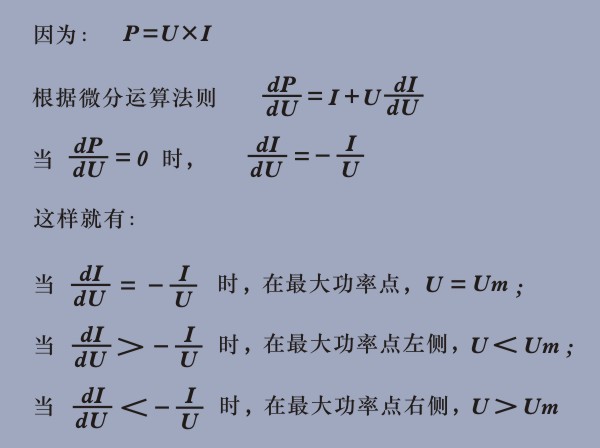
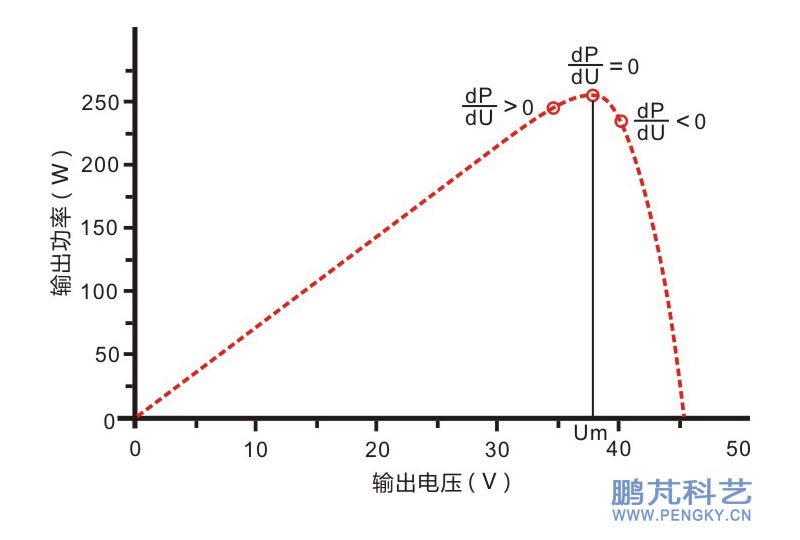
电导增量法是通过比较太阳能电池的瞬时电导和电导的变化量来计算最大功率点的方法,目前应用也较多,其原理如下。 在图5中有一条太阳能电池板的电压功率曲线,曲线上有3个点,在曲线最顶处是最大功率点,对应电压为Um,根据数学知识,在最大功率点曲线的斜率为零,也就是dp/du=0;在电池板输出电压大于Um时,曲线的斜率为负,dp/du<0,如右侧点;在电池板输出电压小于Um时,曲线的斜率为正,dp/du>0,如左侧点。 |
|
| 于是可以通过判断dp/du的值来判断电池板的工作点位置。 |
 |
计算的主要流程见图6,当前时刻t的电压为Ut,电流为It;上次计算后进行控制的电压为Ut-1,电流为It-1;ΔU是电压修正的步长,Utk为当前计算后应控制的电压。 首先判断dU与dI是否同时为0,同时为0则表示已工作在最大功率点,保持Utk值仍为Ut-1值;如果dU=0,dI≠0,则通过判断dI的正负来修正Ut-1值为Utk值;如果dU=0,则根据dI/dU与-I/U之间的大小关系来修正Ut-1值为Utk值。 |
|
电导增量法的优点:在光照和温度变化时,太阳能电池阵列的输出电压能平稳地追随环境变化,使太阳能光伏阵列最后稳定在最大功率点附近的某个点,而不是来回的跳动,电压波动较扰动观察法小,控制精确,响应速度较快。 电导增量法的缺点:对硬件的要求特别是对传感器的精度要求比较高,整个系统造价较高。
以上介绍了最大功率点跟踪控制常用算法恒定电压法、电导增量法、扰动观测法的原理,除此之外还有基于扰动观测法的改进自适应算法、利用数学模型或查表方法确定最大功率点的方法等等,本课件就不一一介绍了,有兴趣的网友请另参考资料。 |

| 返回上一页 | Back to Previous Page |
