 |
| 多普勒测风激光雷达 |
| DoppIer Wind Lidar |
在水平轴风力机栏目风的测量课件中介绍了几种常用的测风传感器,近几年 测风激光雷达开始用于风力发电机测风,我国金风集团在6MW的风力发电机组中采用了激光雷达测风。下面介绍测风激光雷达的基本原理。 |
| 多普勒效应 |
测风激光雷达是建立在多普勒效应理论基础上,下面介绍什么是多普勒效应。 在1842年,奥地利数学家、物理学家多普勒路过铁路旁,一列火车从他身旁驰过,他发现火车从远方驶来时汽笛声变响,音调升高,而火车驶离时汽笛声变弱,音调降低。视频1演示了这个现象(视频来自网络)。 |
| 视频--多普勒效应-运动火车汽笛声 |
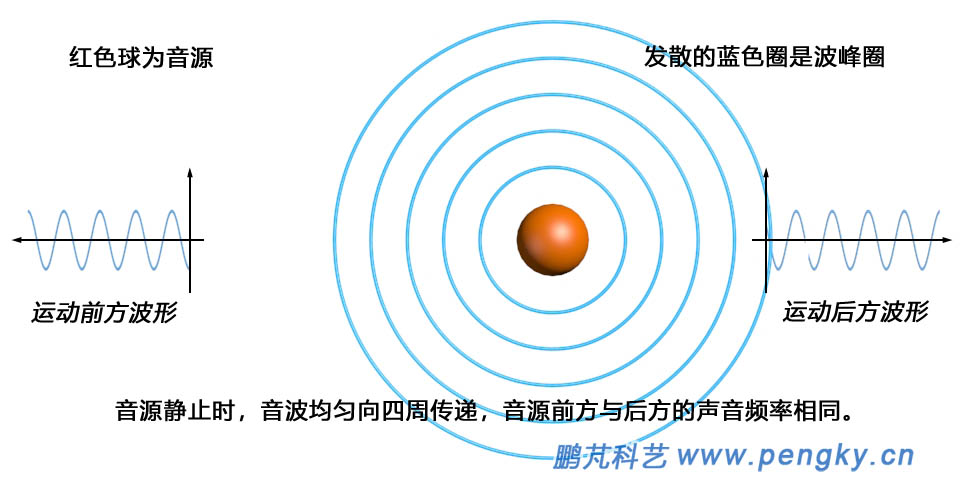
这个物理现象引起多普勒极大兴趣,经过研究得出如下结论。 声源向观测者运动时,声波的波长减小(频率升高),音调升高;当声源离开观测者而去时,声波的波长增加(频率降低),音调降低。 在图1中,音源(橙红色小球)静止时,在音源前方听到的声音与音源后方听到的声音频率相同。 |
|
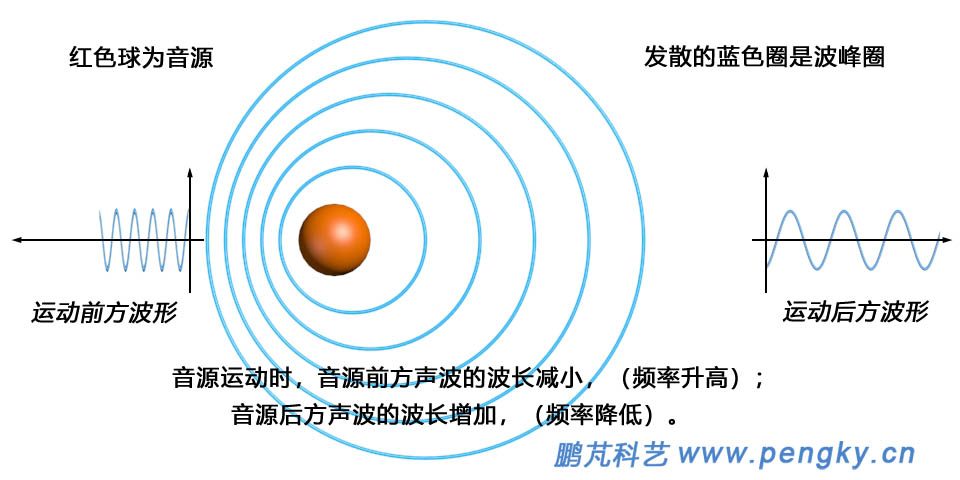
图2是音源向前方移动时,在音源前方听到的声音频率比音源后方听到的声音频率要高。 |
|
下面的动画演示这一现象。注:动画仅表示音源静止与运动时前方与后方声音频率的不同,并不表现频率变化的过程。 |
| 动画—多普勒效应演示动画 |
 |
音调的变化同声源与观测者间的相对速度和声速的比值有关。这一比值越大,改变就越显著,这就是“多普勒效应”,由此产生的频率变化称为多普勒频移。 多普勒效的数学公表达式: 观察者和发射源的频率关系为 |
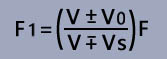 |
F1 为观察到的频率; 多普勒效应不仅适用于声波、对无线电波与光波同样适用。 |
| 激光雷达测风原理 |
在空中含有许多气溶胶颗粒,是指均匀分散于大气中的固体微粒和液体微粒,例如雾、烟、霾、微尘和烟雾等。测风激光雷达向空中发射激光束,激光照射到这些气溶胶颗粒会产生反射,运动颗粒的反射波会出现多普勒频移,频移值为发射波与反射波频率之差。 在图3中,激光雷达发射的激光波与地面垂直线的夹角为φ,激光遇到气溶胶颗粒会会产生反射,激光雷达接受到反射波后进行处理。通过发射波与接受波气溶胶颗粒时间差得到气溶胶颗粒与雷达的距离L 气溶胶颗粒的高度h=L·cosφ |
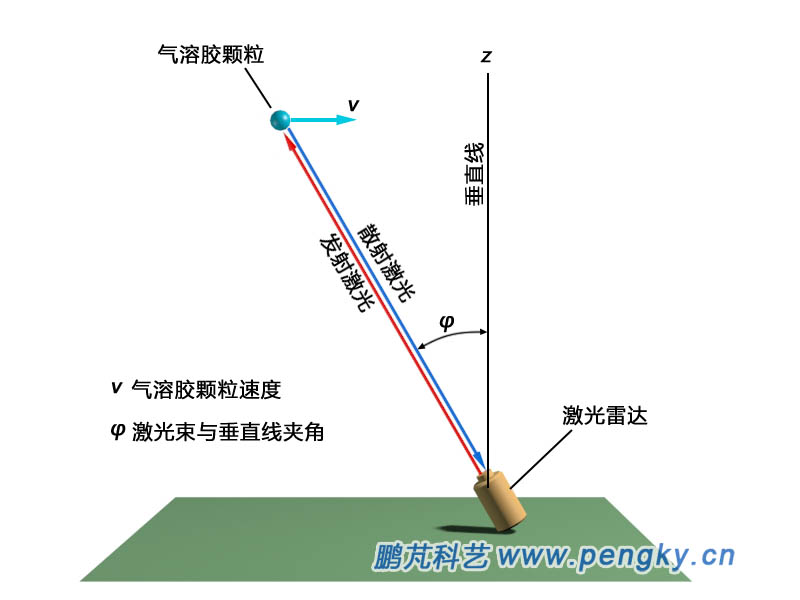 |
| 图3--激光雷达测风原理 |
气溶胶颗粒的水平移动速度V仅是朝向激光雷达垂直线z方向的速度,并不是实际的风向与风速。要得到实际的风向风速通常使用3维激光测风雷达。 |
| 3维激光测风雷达 |
采用所谓圆锥扫描技术的3维激光测风雷达非常实用于低空风场的测量。激光测风雷达向空中发射3束或更多的激光束。 图4是发射3个激光束的激光测风雷达,3个激光束与激光雷达垂直轴Z的夹角都为φ,3个激光束在水平面的夹角为120度,测风平面的高度h。根据前面介绍的原理,可以同时测得3 个方向相对Z轴的风速Ve,Vnnw,Vssw,把这3个风速矢量进行合成,就可得到此刻h高度上的水平风速与风向。 |
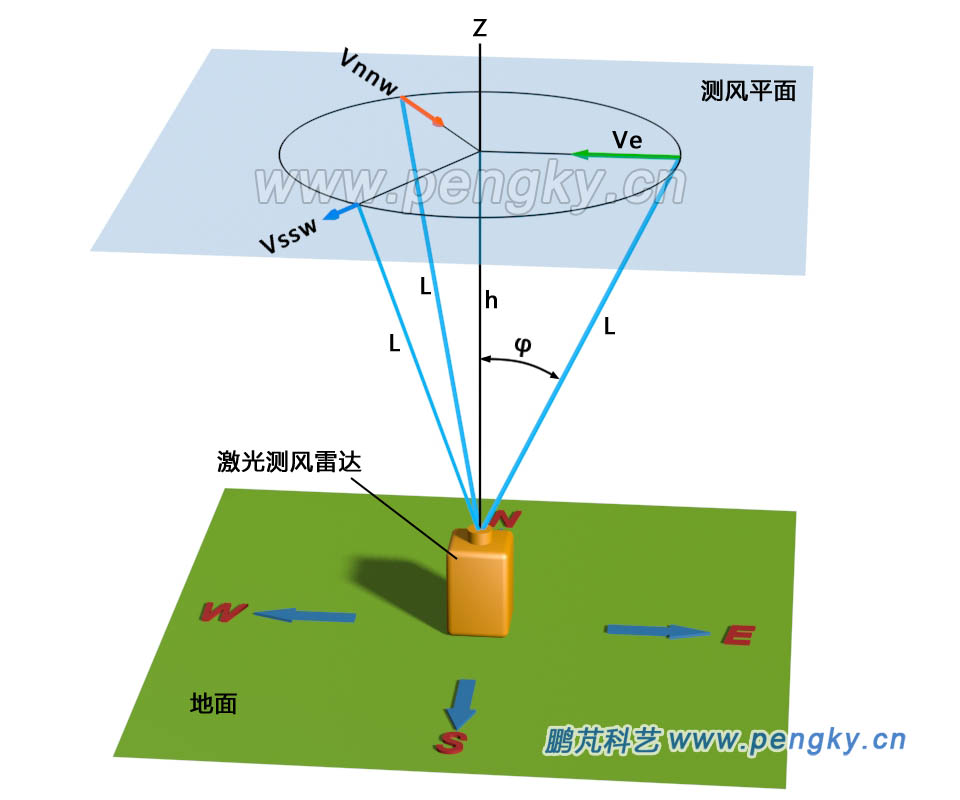 |
| 图4--3维激光测风雷达原理 |
3个或多激光束个通常由一个激光发射接受器旋转扫描完成。 看起来视乎很简单,实际上非常复杂,大气中满是气溶胶颗粒,反射的波非常复杂,是大量反射波的叠加,如何从海量的杂波中选出所需的波是非常复杂的技术,要使用精密的模拟与海量的数字处理技术方可解决。所以目前激光测风雷达的造价还十分昂贵,但随着器件性能的提升,价格会逐渐降低。 由于激光雷达可测任意高度的风场,而且是实时监控,非常方便。一些激光雷达可测十几公里高的风场,在机场,火箭、导弹发射场首先得到应用,不过要测高空某点的风况,可能要几个激光雷达在不同位置同步测量方可准确。 目前风电场的评估也开始使用激光测风雷达,比起建测风塔还是方便许多,特别是海上漂浮式激光测风系统可免去建海上测风塔的困难,在欧洲已开始使用海上漂浮式激光测风系统,据报道国内刚购进两台试用。 |
| 激光测风雷达在风力机中的应用 |
风力发电机组通常在机舱上部安装机械式测风装置,由于安装在风轮后面,受到旋转叶片的遮挡,叶片的尾流对风速与风向影响都较大,这些滞后与不准确的数据使风力机无法运行在最佳状态。采用激光测风雷达可测得风轮前方数十米至数百米的风况,高度从地面到数百米均可检测。 图5是风力机测风雷达测风示意图,在机舱上部安装的激光测风雷达,雷达对风力机前方进行扫描,图中表示上下左右的扫描激光束,浅红色圆锥是激光束扫描测风的空间。其原理与3维激光测风雷达相同,只是方向变为水平,计算方法有所变化而已。 |
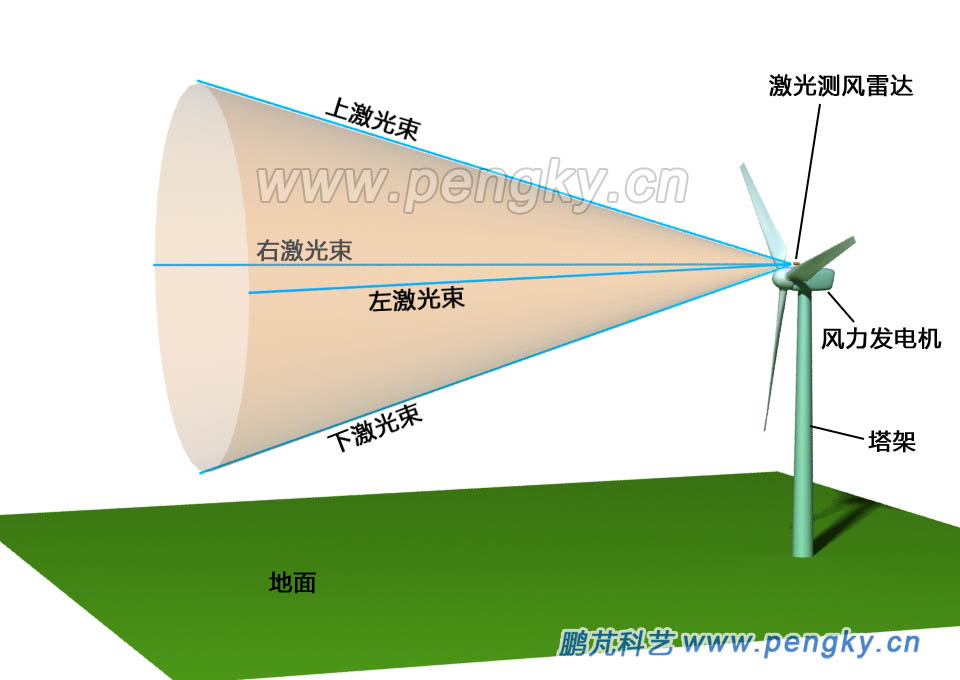 |
| 图5—风力机激光测风雷达示意图 |
这些数据让风力机提前预知来风状况,为风力机控制作好预前准备,达到最佳运行效果,不但可以提高风力机的效率,还可风力机对突变的来风做好应急准备,减小受损可能。激光雷达测风技术使风力发电机组的控制走向智能化。 据报道国内已有部分风电企业在进行相关试验,金风科技已在6MW的风力发电机组中使用了激光雷达测风技术。 图6是网络上的激光测风雷达,左图是3维激光测风雷达,右图是安装在机舱上的风力机机载激光测风雷达。 |
 |
| 图6--激光测风雷达照片 |
图7是网络上的欧洲漂浮式激光测风系统照片 |
 |
| 图7--欧洲海面漂浮式激光测风系统 |
| 返回上一页 | Back to Previous Page | |||
 |
||||